
In November of 2016 Endurance starts developing a Rash 3 on the basis of the programmable logic device FPGA Altera/Xilinx.

A programmable logic device (PLD) is an electronic component used for creation of digital devices. Unlike conventional digital circuits, the FPGA operation logic is set by means of programming (designing). A programmer and IDE (a debugging environment), allowing to set the desired structure of the digital device in the form of a schematic or a program in special hardware description languages: Verilog, VHDL, AHDL and others, are used.
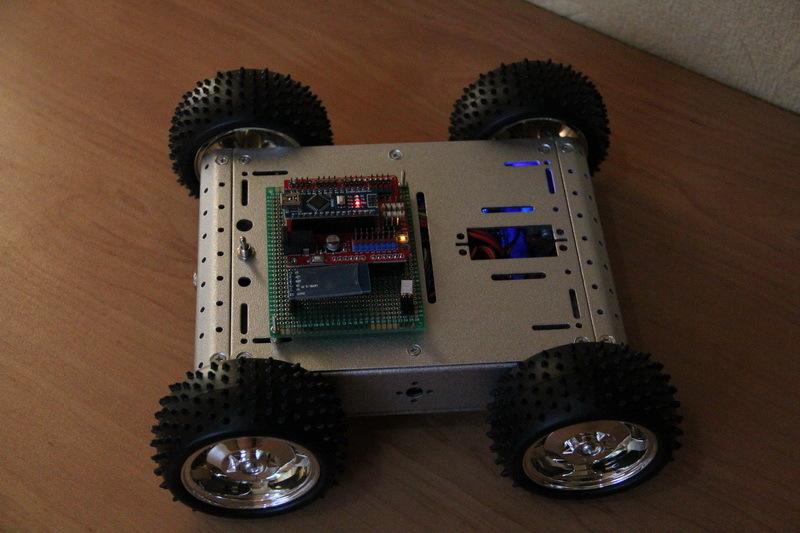
A RASH3 is
The robot is able to move indoors and outdoors, controlled by an operator with the help of a phone or tablet via Bluetooth and WiFi. One of the specific features of the robot is an option to direct its movement by means of head pointing command. With the right turn of the head the operator directs the robot to the right, while the left turn of the head directs the robot to the left. Google API for Android provides this feature.
The platform is multifunctional and can be used for autopilot testing (if a Lidar, sonars and IR sensors are installed). Using this platform, it is also possible to create am app. with Augmented reality, but the main feature is the facility to install a robotic arm, which makes the platform suitable for scientific research and practical work (for example, as a mini robot-loader).
An important aspect is a large number of fasteners available on a wheel platform, which allows modifying and upgrading the frame by means of 3D printing of certain details.
getting the idea of the FPGA operation principles
FPGA microelectronic chips are used in military and aerospace fields, in reliable industrial systems, in telecommunications and high-speed digital signal processing.
Creation of a Rash 3 robot based on FPGA is low-level electronics development. This sophisticated level ensures quick and simultaneous execution of multiple operations, and organizes productive and flexible data processing.
Development in VHDL is a new level of control that fundamentally differs from microcontrollers programming. The principal difference of a FPGA-based system is simultaneous, high speed (within a few clock periods, that is, literally, a few tens of nanoseconds) signals processing, performing computations, while operations in Arduino microcontroller-based systems are carried out sequentially.
Genericity. Change of a microcontroller model requires a detailed study of the documentation. While developing anything on FPGA it is enough to know Verilog or VHDL to program any FPGA.
Development of a RASH3 on FPGA will allow a novice developer to understand how and why microelectronic chips work!
The RASH3 on FPGA will be a completely open-source solution available to all developers.
Want to know more – write us to: [email protected]
FB: @george.fomitchev
Twitter: @reangeorge
Instagram: @endurancerobots
LinkedIN: georgefomitchev
YouTube: GeorgeFomichev
SlideShare: GeorgeFomitchev

 Save 148$ today!
Save 148$ today!